- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Hvordan forstyrrer man dronelink?
Link-system er en vigtig del af UAVS, dets hovedopgave er at etablere en luft-jord tovejs datatransmissionskanal, som bruges til at fuldføre fjernstyring, telemetri og missionsinformationstransmission afUAV'er ved jordkontrolstation. Fjernstyring realiserer fjernbetjening af droner og missionsudstyr, og telemetri realiserer statusovervågning af droner.
Missionsinformationstransmissionen transmitterer video, billede og anden information opnået af den luftbårne missionssensor til måle- og kontrolstationen gennem den trådløse downlink-kanal, som er nøglen til fuldførelsen af UAV'ens opgave, og kvaliteten er direkte relateret til evnen til at finde og identificere målet.


Uav link system sammensætning
Den luftbårne del afUAV-link inkludererAirborne Data Terminal (ADT) og antennen. Luftbårne dataterminaler inkluderer en RF-modtager, sender og modem til at forbinde modtageren og senderen med resten af systemet. Nogle luftbårne dataterminaler har også processorer til at komprimere data for at imødekomme båndbreddebegrænsningerne for downlinket. Antennen er en rundstrålende antenne, og nogle gange kræves der en retningsbestemt antenne med forstærkning.
Jorddelen af linket kaldes også jorddataterminalen (GDT). Terminalen omfatter en eller flere antenner, en RF-modtager og -sender og et modem. Hvis sensordataene komprimeres før transmission, skal jorddataterminalen også bruge en processor til at rekonstruere dataene. Jorddataterminalen kan opdeles i flere dele, som generelt omfatter en lokal dataforbindelse, der forbinder jordantennen og jordkontrolstationen, og flere processorer og interfaces i jordkontrolstationen.
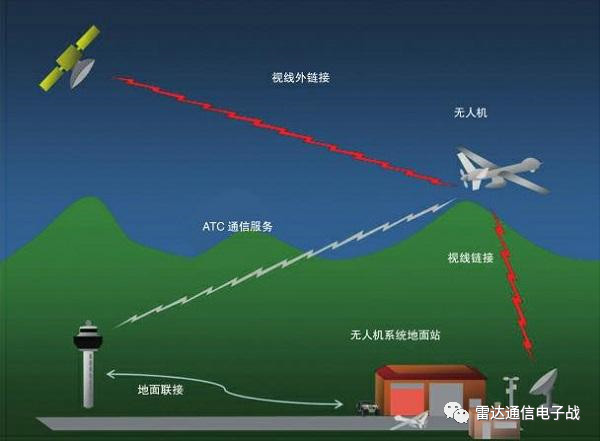
For langtidsholdbare UAV'er, for at overvinde indflydelsen af faktorer som terrænblokering, jordkrumning og atmosfærisk absorption og forlænge aktionsafstanden af links, er relæ en almindelig måde. Når relækommunikationen er vedtaget, er relæplatformen og det tilsvarende videresendingsudstyr også en af komponenterne i UAV-linksystemet. Driftsafstanden mellem dronen og jordstationen bestemmes af radioens sigtelinje.
Uav link kanal frekvensbånd
I processen med UAV jord-til-luft datatransmission vil trådløse signaler blive påvirket af faktorer som terræn, jordobjekter og atmosfære, hvilket resulterer i refleksion, spredning og diffraktion af radiobølger, der danner flervejsudbredelse, og kanalen vil blive forstyrret af forskellige støj, hvilket resulterer i et fald i datatransmissionskvaliteten.
Inden for måling og kontrolkommunikation varierer virkningen af trådløse transmissionskanaler med de forskellige driftsfrekvensbånd, så det er nødvendigt at forstå de vigtigste frekvensbånd, der bruges til UAV-måling og -kontrol. Bærefrekvensområdet for UAVs måling og kontrolforbindelse er meget bredt. Lavbåndsudstyr har en lavere pris og kan rumme et begrænset antal kanaler og datatransmissionshastighed, mens højbåndsudstyr har en højere pris og kan rumme et større antal kanaler og en højere datatransmissionshastighed.
Hovedfrekvensbåndet til anvendelsen af UAV-link er mikrobølge (300MHz ~ 3000GHz), fordi mikrobølgeforbindelsen har en højere tilgængelig båndbredde, kan transmittere videobilleder, og den høje båndbredde og højforstærkningsantenne, der bruges af den, har god anti-interferensydelse. Forskellige mikrobølgebånd er velegnede til forskellige linktyper.
Generelt er VHF-, UHF-, L- og S-bånd mere velegnede til billige kortdistance-UAV-line-of-sight-links; X- og Ku-båndene er velegnede til linie-of-sight-links og luftrelæ-links på mellem- og langdistance-UAV'er; Ku- og Ka-båndene er velegnede til mellem- og langrækkende satellitrelæforbindelser.
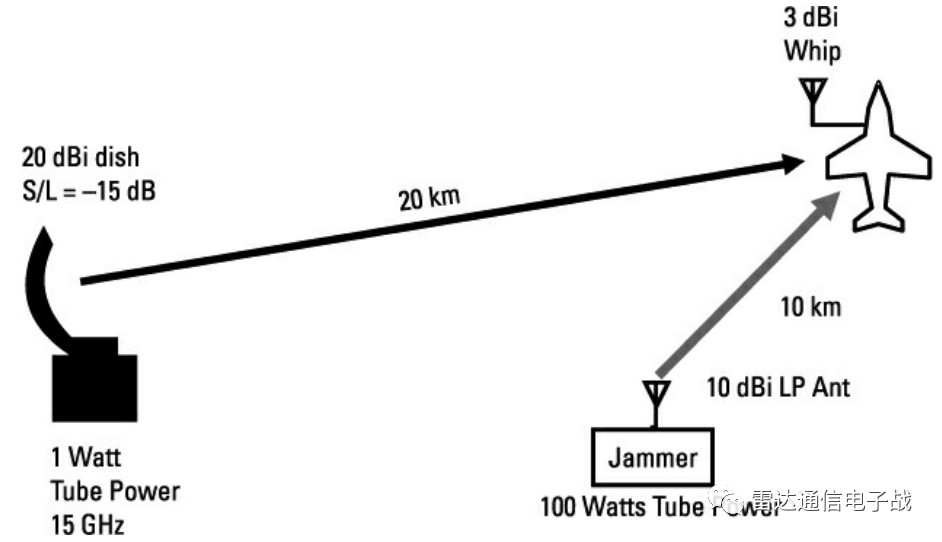
Hvis interferens til ubemandede luftfartøjsforbindelser (UAV) overvejes, skal det blokerende objekt tages i betragtning. Dronen har et kontrolled fra kontrolstationen til dronen, også kaldet et uplink; Den har også et datalink fra dronen til kontrolstationen, også kendt som et downlink.
Interferens til kontrolforbindelsen
Kontrollinket er et uplink, så jamming-målet for jammeren er UAV'en. Jamming-scenariet er vist i figuren nedenfor, og nogle generelle parameterantagelser er givet: kontrolstationens butterfly-antenneforstærkning er 20dBi, sidlobe-isolationen er 15dB, og sendereffekten er 1W. UAV'en er 20 km væk fra jordstationen, og UAV'ens piskeantenneforstærkning er 3dBi.